 zfn9
zfn9
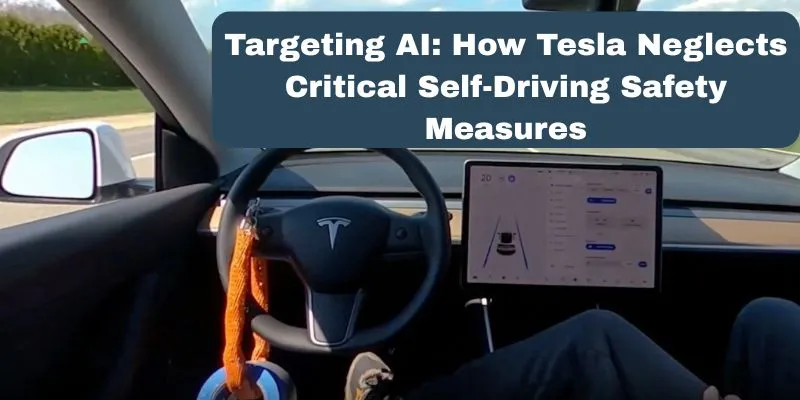
A leading artificial intelligence company has unveiled an innovative video-generative model tailored for self-driving vehicles. This breakthrough technology marks a significant step forward in training and testing autonomous systems. By generating realistic driving scenarios as video sequences, it allows self-driving algorithms to encounter rare and complex events before actual road deployment. This advancement could reshape development timelines and improve safety margins for autonomous driving technologies.
How the Video-Generative Model Works
At the core of this new model is its ability to create lifelike, fluid sequences that resemble real driving experiences rather than disjointed snapshots. Traditional simulation tools for self-driving cars often rely on pre-recorded video clips or game-like 3D environments, which can feel artificial and require extensive manual scene-building.
This innovative model takes a different approach by learning directly from vast libraries of real-world driving footage. It analyzes object movements, weather changes, and interactions between cars and pedestrians to create seamless, plausible scenarios. Unlike earlier methods that generated isolated frames, this model produces continuous motion, helping autonomous systems anticipate and respond to hazards effectively.
What enhances its power is flexibility. Engineers can define specific parameters, like fog at dusk or heavy traffic in rain, to generate countless variations of the same situation. This variety enables vehicles to learn subtle cues they might otherwise overlook, providing a more natural training environment that mirrors real road complexities.
Impact on Self-Driving Car Development
The release of this model addresses several challenges in developing autonomous driving technology. One major hurdle is encountering rare or dangerous situations that must be handled flawlessly. Waiting for these events in real life is impractical, and scripting them in closed-course testing is costly and time-consuming.

By generating high-quality synthetic videos of these edge cases, developers can expose their algorithms to a broader range of challenges early in the development process. This approach enhances both the breadth and depth of testing, leading to more robust and safer self-driving software before physical testing begins.
Another benefit is scalability. Road testing is expensive, and collecting real-world data can be logistically challenging, especially for unusual scenarios. This model allows thousands of virtual miles to be “driven” in the lab, offering a controlled, reproducible way to evaluate performance under diverse conditions. Developers can adjust variables like time of day, road type, and surrounding vehicle behavior to efficiently stress-test their systems.
Benefits and Challenges of Video-Based Simulation
The advantages of a video-generative model for self-driving systems are clear, but the technology also presents challenges. Synthetic video offers unmatched diversity and control compared to physical testing. It allows developers to produce consistent sequences for debugging, a feat harder to achieve with real-world testing where no two runs are identical.
Synthetic video also facilitates safer experimentation with dangerous scenarios. Engineers can simulate multi-car pile-ups or icy highways without risk, allowing them to observe system responses, make adjustments, and retest under slightly modified conditions.
However, the quality of the model depends heavily on its training data. If the dataset lacks certain scenarios or is biased towards specific conditions, the generated videos may reflect those gaps, potentially creating blind spots in testing.
Moreover, translating synthetic scenarios to real-world unpredictability remains a challenge. No model can perfectly replicate reality, necessitating validation with real-world driving. Overfitting, where systems perform well on synthetic data but falter in practice, remains a concern.
What This Means for the Future of Autonomous Vehicles
The introduction of this video-generative model signifies a shift towards more advanced and nuanced training tools for self-driving cars. It underscores the growing recognition that simply accumulating real-world miles is insufficient for reaching higher levels of autonomy. Vehicles need to be prepared for situations that even millions of miles of driving might not reveal.

Synthetic data, particularly in realistic video form, fills this gap and complements real-world testing rather than replacing it. This blend of physical and virtual training could make autonomous vehicles more reliable and adaptable. It also opens possibilities for customizing training to specific environments, such as urban, rural, or mountainous areas, and quickly adapting to changing infrastructure or legal requirements in different regions.
As technology matures, it could extend beyond self-driving cars into robotics, delivery drones, or any system that needs dynamic environment perception and reaction. The model’s ability to generate visually coherent, time-aware sequences makes it a valuable tool for any application where motion and timing are crucial.
Conclusion
The video-generative model for self-driving development equips autonomous systems to handle unpredictable road situations by simulating realistic, controlled scenarios. Engineers leverage these videos to train algorithms on diverse events, enhancing safety and testing efficiency. Despite challenges like data quality and real-world translation, the technology marks a significant advancement. As it evolves, video-based simulation is poised to become a regular component in developing self-driving cars, from prototype to production.